دنیای مهندسی سازه های دریایی
Offshore Structuresدنیای مهندسی سازه های دریایی
Offshore Structuresدرباره من
 فوق لیسانس مهندسی عمران با گرایش مهندسی سازه های دریایی علوم تحقیقات تهران
bijan_4823t@yahoo.com
I am Bijan Mohammadi, Education: MS.c Civil Engineering- Marine Structures Engineering
For more information on the bottom left of the screen authorities to MY resume
www.linkedin.com
ادامه...
فوق لیسانس مهندسی عمران با گرایش مهندسی سازه های دریایی علوم تحقیقات تهران
bijan_4823t@yahoo.com
I am Bijan Mohammadi, Education: MS.c Civil Engineering- Marine Structures Engineering
For more information on the bottom left of the screen authorities to MY resume
www.linkedin.com
ادامه...
Deepwater petroleum exploration and production : a nontechnical guide / 2nd Edition, William L. Leff ler, Pennwell,2011
این کتاب دارای 372 صفحه می باشد این کتاب کاربرد زیادی در طراحی تجهیزات زیر دریا و انتقال نفت و گاز به سکو و از آنجا به خشکی می باشد.
Deepwater petroleum exploration and production : a nontechnical guide / 2nd Edition, William L. Leff ler, Pennwell,2011
This File is Password
Password: CE-MS MS.c Bijan Mohammadi
All Text & change the color to use to download it
کلمه عبور /Password دانلود/Download

Contents
Chapter1 A Century Getting Ready
Chapter2 —Letting Go of the Past
Chapter3 —Geology and Geophysics
Chapter4 —Exploring the Deepwater
Chapter5 —Drilling Rigs
Chapter6 —Drilling and Completing the Well
Chapter7 —Development Systems
Chapter8 —Fixed Structures
Chapter9 —Floating Productions Systems
Chapter10 —Subsea Systems
Chapter11 —Topsides
Chapter12 —Pipelines, Flow lines, and Risers
Chapter13 —Offshore Support Vessels
Chapter14 —Technology and the Third Wave
عکس خاطره دوران دانشجوی/ Photo memory of student/ Foto de la memoria del estudiante

این فایل مخصوص دانشجویان هم دو ره ای های مهندسی سازه دریایی می باشد و بدون اجازه آنها تصور فعلا شفاف نیست
دانلود/ Download
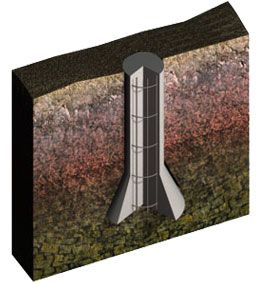
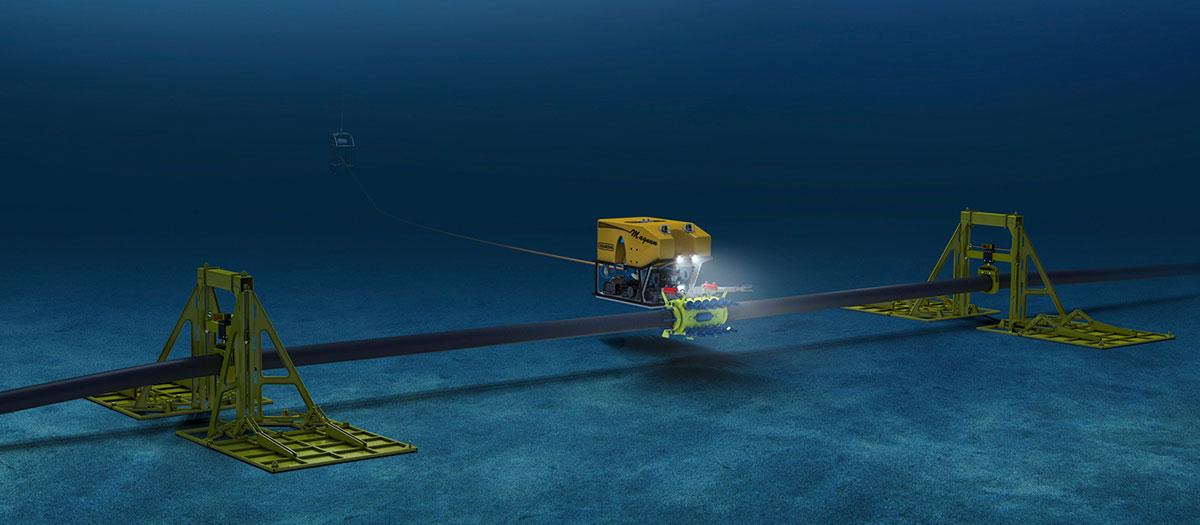
نصب و راه اندازی شمع پین دار در بستر دریا/Installation of pin piles on the seabed
این انیمیشن نصب و راه اندازی شمع پین داردر بستر دریا را نشان می دهد.تیغه حفاری دریایی از راه دور
This is animation installation of blade offshore remote drilling

این ایده توسط شرکت BORD برای اجرای شمع های پیچشی در زیر دریا انجام گردیده است همانطور که در انیمیشن نصب و راه اندازی شمع پین دار در بستر دریا ملاحظه می کنند برای متصل شدن سازه های انرژی تجدیدپذیر توسط زنجیر به کف دریا می باشد به جای بلوک های سنگین بتنی نوع های دیگر آن که در آینده به نمایش گذاشته خواهد شد برای پایه های جکت مورد استفاده قرار می گیرد. بلوک های سنگین بتنی برای نگهداشتن سازه های روی دریا یا میانه آن استفاده می شود در آینده درباره طراحی پرورش ماهی در دریا ( قفس پرورش ماهی ) و نقش این بلوک ها توضیح می دهد تیغه حفاری دریایی از راه این عمل را انجام می دهد.
سوال های مطرح درباره این سازه/ Raised questions about the structure
1- آیا سازه نسبت به طولی که دارد وزن مناسب را دارد؟

2- گرویت که توسط پمپ انتقال می یابد کاملا فضای ما بین شمع و دیواره آن را پر می کنند؟
3- آیا شمع فشار جانبی قابل قبولی دارد و فشار آب روی انتقال گرویت مشکلی به وجود نمیارد؟
4- آیا شمع ضریب اصطکاکی لازم را دارا می باشد؟
5- آیا در فاصله انتقال گرویت با پمپ دما سرد تاثیری روی مخروط گرویت و آب دارد؟
6- با توجه به شور آب دریا شمع فلزی عایق می باشد؟
7- آیا سرعت موج و سرعت گروهی موج چقدر تاثیر گذار هستند؟

شما می توانید هر نوع سوال در این باره داشته باشید از دکتر آقای نیل McNaughton بپرسید
Neil.mcnaughton@bladeoffshore.com 
Blade Offshore Remote Drilling

Blade Offshore Remote Drilling has produced a series of patented designs for the efficient and economic installation of pin piles on the sea bed. The innovative designs provide robust moorings in medium to hard seabed conditions, and are particularly suitable where installation requirements in high tidal currents present significant technical and operational challenges. These pioneering designs provide solutions when conventional anchoring methods are ineffective or cost-prohibitive. The structure to be anchored, the sea bed geography and the tidal conditions determine which of the deployment techniques (demonstrated below) is the most appropriate
Sub sea Pin Pile Drilling Unit

This procedure provides a simple, cost-effective solution for fastening structures to the sea bed in a single deployment. The Sub Sea Drilling Unit (SSDR) carrying the pile is lowered down to the host structure and manoeuvred into place using azimuth thrusters. After securing to the structure, the SSDR drills the annulus, flushes the hole and grouts the pile into position. The SSDR unlocks and is retrieved to the surface
Subsea Pipeline Design, Analysis, and Installation,Gulf Professional Publishing,2014
این کتاب نصب و تجزیه و تحلیل ، طراحی خطوط لوله ها در زیر دریا می باشد.
This is Sub sea Pipeline Design, Analysis, and Installation, Gulf Professional Publishing,2014
This file is password
Password: CE-MS MS.c Bijan Mohammadi
All text and change the color to use to download it
کلمه عبور / Password دانلود /Download

با تشکر از مهندس محمد علی بهاری برای اسال این کتاب و ارایه آن در وبلاگ
نویسنده این کتاب مقالات زیاد در مورد خطوط لوله های زیر دریا و رایزر ها ارایه کرده است و این کتاب دارای 785 صحفه می باشد.

I am delighted to write a brief Foreword to this
extensive handbook for subsea pipeline design and installation. It is often a
challenge to find a single book that discusses all aspects of subsea pipeline
design and installation in sufficient detail that the practicing engineer can
have this book or volume of books as a desk reference for a large range of
design topics, instead of the engineer having to search for specific subject
matter in Conference Proceedings. And the authors have succeeded in accomplishing
just that. The effort it took in writing well over a 750 pages of text and formulae
and cross-checking was truly a labor of love and dedication to the profession of
subsea pipeline engineers, and for those readers who wish to know more about a
particular subject, the list of references at the end of each chapter is truly outstanding

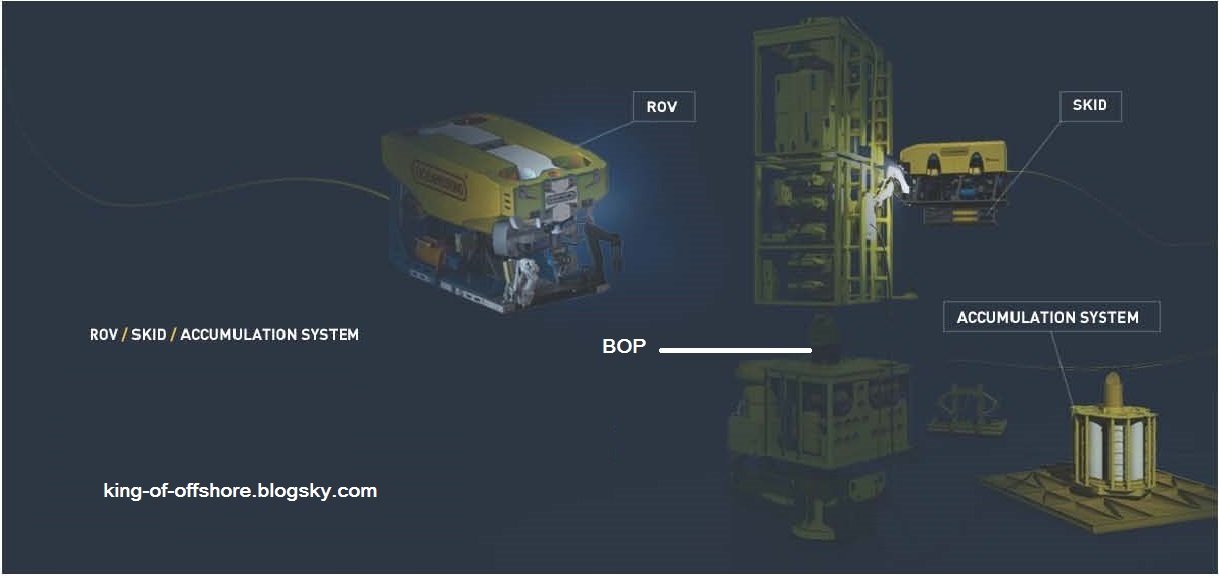
آر او وی ها (ROV) یا چشم دریا /Remotely Operated Vehicle ROV
این فیلم معرفی دستگاه ROV (چشم دریا) می باشد.
This is introduces The Remotely Operated Underwater Vehicle or Remotely Operated Vehicle (ROV
وسیله نقلیه قابل کنترل از راه دور زیر دریایی ، آر او وی ها (ROV) یا چشم دریا چیست؟
در مورد اسم این وسیله باید گفت بهترین اسم چشم دریا است چون که تجهیزات دیگری با کاربردهای گوناگون ولی پیشرفته تر بنام های AUV و UUV وجود دارد ROV مخفف Remotely Operated underwater Vehicleیا Remotely Operated Vehicle و AUV مخفف Autonomous Underwater Vehicle و UUV مخفف Unmanned Underwater Vehicles
Nereid Under Ice مخفف Nereid UIاست.

برخی از عزیزان این آنها را به عنوان ربات های زیر آبی یاد کنند ولی تجهیزات گسترده به صورت ربات ها در زیر دریا به کار می رود با کارایی های متفاوت مانند این عکس
منابع و صنایع دریایی نفش و تأثیر مهمی در زندگی انسانها دارند. به همین دلیل مطالعه و بررسی بسیاری از مسائل مهندسی، زیستشناسی، تجاری و نظامی مرتبط با دریا، همواره مورد توجه محققان بودهاست. با توسعه و گسترش صنایع دریایی و علوم مرتبط با دریا، امروزه برای انجام بسیاری از کاربردهای کشف و استخراج منابع زیرآبی، بازرسی و جمعآوری اطلاعات زیست محیطی و تحقیقاتی و نیز نصب، تعمیر و نگهداری سازههای ساحلی و دریایی، به کارگیری تکنولوژیِ خاص و جدیدی برای پاسخگویی به نیازهای روزافزون پیش آمده، ضروری مینماید. استفاده از وسائل و ابزارآلات مهندسی که قابلیت به کارگیری در اعماق آب را دارند و کاربریهای متنوع در فضا و بستر دریا را ممکن میسازند، چنان در سالهای اخیر توسعه و گسترش یافته که توانایی بشر را در بررسی، تحقیق و کار در اعماق دریا، به شدت متحول نمودهاست.
استفاده از تجهیزاتی که بتوان آنها را بدون حضور مستقیم نیروی انسانی و از راه دور هدایت و کنترل نمود، کاربردهایی فراوانی یافتهاند و در بسیاری از موارد به جزء جدا نشدنیِ کاربردهای تجاری و صنعتی بدل گشتهاند، به گونهای که انجام بسیاری از پروژههای مهندسی و تحقیقاتی بدون آنها امکانپذیر نیست. این تجهیزات شامل رباتها و بازوهای مکانیکی هستند که قابلیت انجام عملیات از پیش برنامهریزی شده و نیز اجرای فرامین لحظهای کاربر را به نحوی مناسب و دقیق، دارند. در صنایع زیردریایی بنا به دلایلی که گفته شد، استفاده از تکنولوژی رباتیک در سالهای اخیر توسعه و گسترش فراوانی یافته و در بسیاری از شاخههای علوم و مهندسیِ دریا نقش مهم و اساسی پیدا نمودهاند. بهبود و افزایش کارایی این تکنولوژی نیازمند افزایش مطالعات مهندسی بر روی تمامی انواع و اجزای سیستمها و رباتهای زیرآبی، جهت انجام عملیات پیچیدهتر و فرامین متنوعتر است. به این منظور حجم عظیمی از مطالعات و تحقیقات مهندسی در سراسر جهان و در رشتهها و تخصصهای متفاوت بر این موضوع متمرکز شدهاند

ROV (چشم دریا)
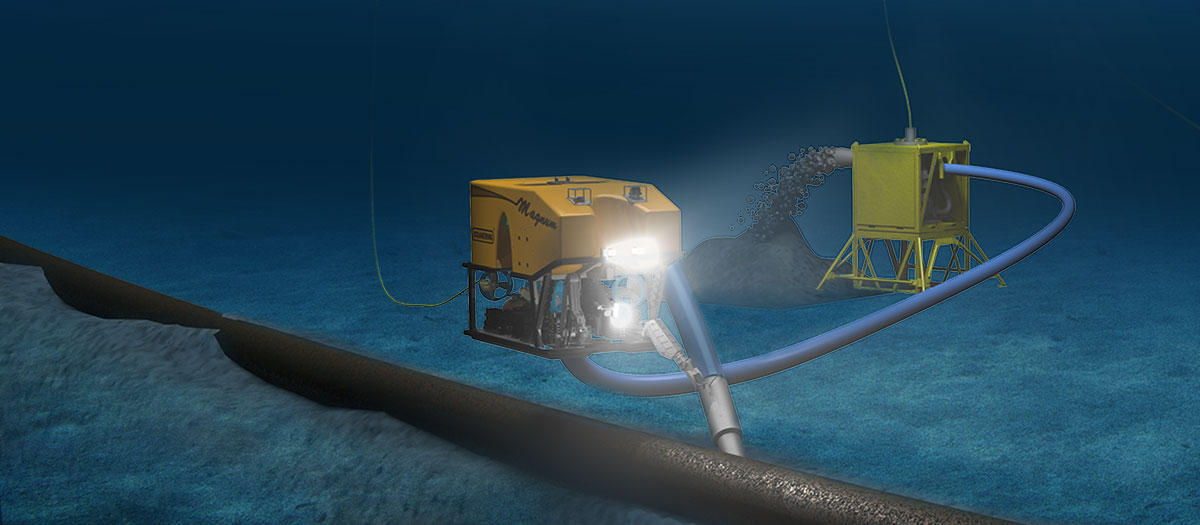
وسائط نقلیه کنترل از راه دور، آراووی ها یا چشم دریا، روبات هائی هستند که در زیر آب توسط یک کنترل کننده هدایت می شوند. این آر او وی ها بوسیله یک رشته کابل با سطح آب در ارتباط می باشند. این کابل شامل یک رشته برای برقراری ارتباط، یک رشته برای ارسال انرژی و یک رشته برای انتقال اطلاعات می باشد. تمام آر او وی ها برای دید در زیر آب دارای ابزار بصری مانند دوربین می باشند. علاوه برآن بسته به نوع کاربردشان دارای ابزارهای دیگری نیز هستند. صنعت نفت و گاز فراساحل همراه با پیشرفت فنآوری و افزایش کارآئی آر او وی ها روز به روز در تمام جهان برای عملیات حفاری و انجام امور خدمات مربوط به اکتشاف در آب های عمیق و اجرای پروژه ها بیشتر به استفاده از آر او وی ها روی آورده است.


در اندازه ها و ابعاد متفاوت و با گسترهٴ متنوعی از تکنولوژی ها و امکانات در سال های اخیر طراحی، ساخت، آزمایش و به کارگیری شده و حتی در برخی موارد به تولید صنعتی رسیده اند. انواع این ROV (چشم دریا) از نمونه های کوچک و ساده ای که صرفاً مجهز به دروبین فیلم برداری کوچکی هستند تا گونه های پیشرفته و بسیار پیچیده ای که در اعماق دریاها به انجام عملیات های متنوع و متعددی به کار گرفته می شوند
اجزای ROV (چشم دریا) عبارت اند از سیستم:
هدایتی جهت کنترل ربات، سیستم رانش، سیستم به آب انداختن، منابع تامین قدرت و کابل ارتباطی که توان لازم جهت عملکرد پروانه ها و نیز دستورات و سیگنال های کنترلی را به ربات و داده های تولید شده توسط حسگرها را به اپراتور در سطح دریا منتقل می کنند.
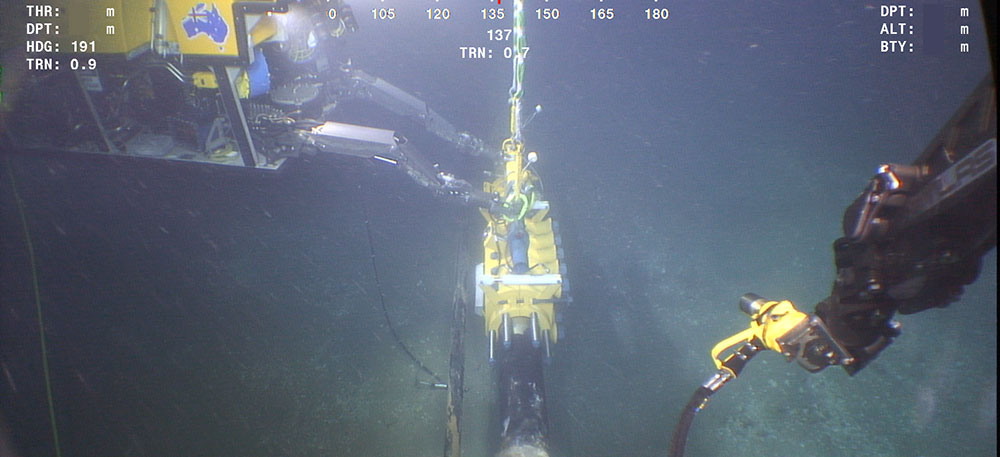
در اغلب موارد این کابل شامل غلاف مقاومی است که آن را در برابر بارهای وارده و نیز برخوردهای احتمالی با اجسام واقع در زیر آب و پارگی و خرابی ناشی از آن، محافظت می کندROV (چشم دریا)، می توانند دارای تجهیزات متفاوتی باشند که از دوربین تلویزیونی کوچک، که جهت مشاهدات ساده به کار می روند تا مجموعه های پیچیده ای از ابزارآلات مانند بازوهای مکانیکی ماهر متنوع و قدرت مند، دوربین های تلویزیونی و ویدئویی و دیگر ابزار و وسایل پیشرفته را در بر می گیرد

تاریخچه آر او وی
غواصان تا عمق مشخصی می توانند در آب فرو روند. رفتن غواصان به آب های عمیق خطرناک و غیر منطقی است. آر او وی ها در صنعت نفت و گاز بصورت ابزاری بی رقیب برای غلبه بر محدودیت های رفتن غواصان به آب های عمیق درآمده اند. اولین روباط های غواصی در اواسط سال های 1960 بصورت وسائط نقلیه سرنشین دار، یا اچ او وی ها، بکار گرفته شدند. گرچه اچ او وی ها تا حدی موفق بودند اما بزرگترین محدودیتشان وجود انسان در آن ها بود. آن ها بعلت وجود انسان قادر به رفتن در آب های عمیق بودند.
گرچه اولین آر او وی کابلی در سال 1953 توسط یک فرانسوی به نام دیمتری ربیکف ساخته شد، اما فن آوری آن توسط ارتش امریکا برای بازیابی اشیاء مفقود شده در دریا کامل شد. نیروی دریائی امریکا در سال 1966 با استفاده از آر او وی یک بمب اتمی را که در اثر سقوط هواپیما در آب های ساحلی اسپانیا مفقود شده بود پیدا نمود و در سال 1973 برای نجات جان دریانوردان یک زیردریائی که در آب های ایرلند غرق شده بود از این وسیله بهره گرفت.
What is remotely operated underwater vehicle or Remotely Operated Vehicle ROV

A remotely operated underwater vehicle, commonly referred to as an ROV, is a tethered underwater vehicle. They are common in deep water industries such as offshore hydrocarbon extraction. While the traditional abbreviation "ROV" stands for remotely operated vehicle, one must distinguish it from remote control vehicles operating on land or in the air. ROVs are unoccupied, highly maneuverable, and operated by a crew aboard a vessel. They are linked to the ship by either a neutrally buoyant tether or, often when working in rough conditions or in deeper water, a load-carrying umbilical cable is used along with a tether management system (TMS). The TMS is either a garage-like device which contains the ROV during lowering through the splash zone or, on larger work-class ROVs, a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimized

The umbilical cable is an armored cable that contains a group of electrical conductors and fiber optics that carry electrical power, video, and data signals between the operator and the TMS. Where used, the TMS then relays the signals and power for the ROV down the tether cable. Once at the ROV, the electrical power is distributed between the components of the ROV. However, in high-power applications, most of the electrical power drives a high-power
Electrical motor which drives a hydraulic pump. The hydraulic pump is then used for propulsion and to power equipment such as torque tools and manipulator arms where electrical motors would be too difficult to implement subsea. Most ROVs are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, water temperature, water density, sound velocity, light penetration, and temperature
History OF THE ROV
Human divers can only submerge to certain depths and the skill and danger involved makes deepwater diving unrealistic developed to overcome the limitations of human subsea divers ROVs have become an indispensable tool to the offshore oil and gas industry

The first iteration of the robotic diving concept was the Human
Occupied Vehicle, or HOV, which was developed in the mid1960s.
While Dimitri Rebikoff is credited with building the first tethered ROV in 1953, the US military expanded on the technology to retrieve equipment lost at sea. In 1966, the US Navy recovered an atomic
bomb lost in a plane crash offshore Spain using an ROV, and in 1973,
An ROV was used to save sailors in a sunken submersible offshore
Ireland
The commercial world quickly began manufacturing preliminary
versions of ROVs for the offshore oil and gas industry. Although these
products were not as successful initially, the technology has come a
long way, and now ROVs are regularly used offshore for petroleum
developments and drilling, military and science efforts,
as well as underwater cable endeavors

Types Of ROVs

ROVs can vary in size from that of a bread box to a large van. The
functions ROVs perform can range from simply carrying a camera to
observe subsea environments to housing multiple agile arms to
perform numerous functions subsea.

Used primarily for observation and inspection operations, Small
Electric Vehicles are the tiniest version of ROVs. These robots simply
carry a single camera and are deployed in waters no greater than 984
feet (300 meters) deep
High Capability Electric ROVs are larger versions of their Small
Electric Vehicle cousins
These ROVs are able to dive to depths up to
20,000 feet (6,096 meters), but they are still only equipped with video cameras and are unable to perform many other tasks because their electricity supply limits them. Primarily used by the science and military industries, High Capability Electric ROVs are unable to perform any heavy tasks typically required by the oil and gas industry

The next iteration of ROV, the Work Class Vehicle is powered electrically and hydraulically, enabling some more serious work subsea. Although payload and lift capabilities are restricted, the Work
Class Vehicle ROV does generally include a seven function manipulator and a five function grabber.
Most of this class of ROV is deployed in the drilling and construction support sector, as well as
pipeline inspection

The most advanced version of ROV is the Heavy Work Class Vehicle
ROV. This kind of ROV is capable of working in waters measuring up
to 10,000 feet (3,000 meters) deep. Aptly named, the Heavy Work
Class Vehicle boasts horsepower ranging from 100 to 250 and has lift
capabilities up to 11,025 pounds. Additionally, these ROVs house
multiple manipulators and grabbers capable of performing subsea tieins and Deepwater installations.

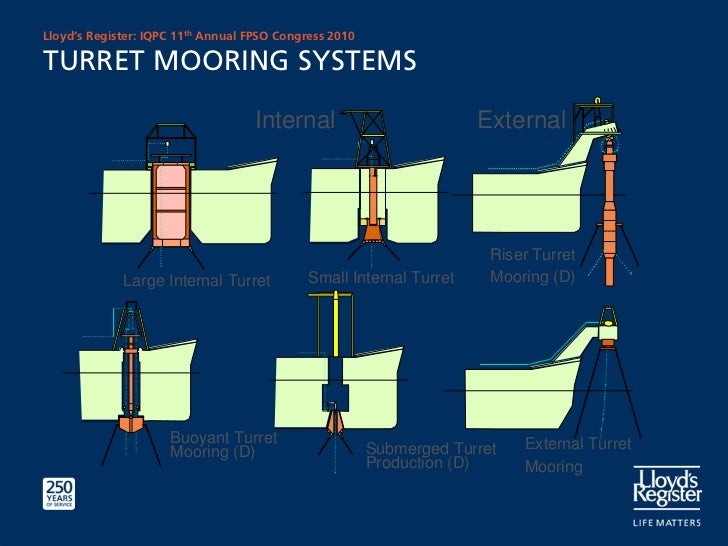
سیستم مهاربند برج گردان / Turret Mooring Systems
این انیمیشن عملکرد FPSO (پایانه شناور ذخیره سازی و بار گیری )وکنترل مهاربند برج گردان را نشان می دهد.
Floating Production Storage & Offloading (FPSO)
All text and change the color to use to download it
دانلود/ Download
سیستم مهاربند برج گردان /Turret Mooring Systems

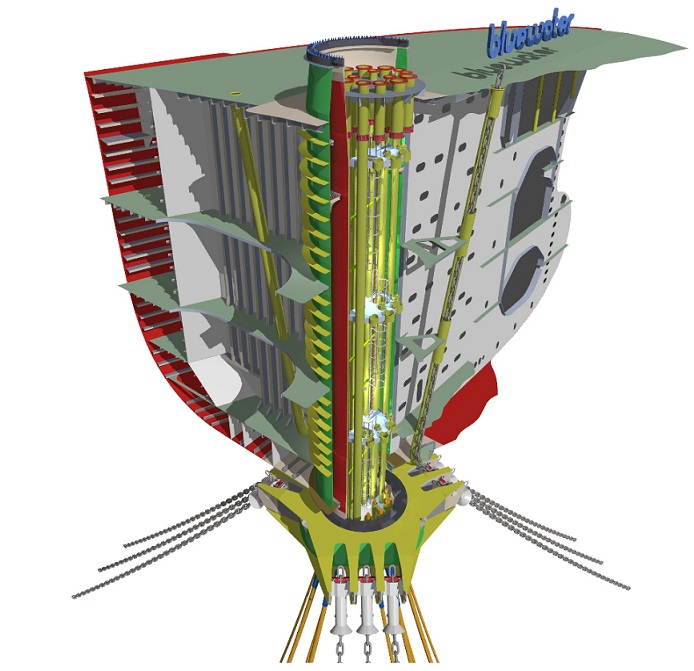
این سیستم شامل یک مجمع برج گردان است که می تواند به صورت یکپارچه به کشتی متصل شود.

سیستم برج گردان می تواند در خارج از کشتی و همچنین داخل بدنه کشتی واقع شود. برج گردان این اجازه را می دهد که کشتی در اطراف آن به راحتی حول محور آن 360 درجه چرخش کند
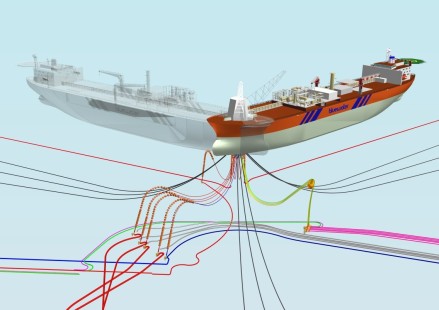
برج گردان به سیستم مهاربند های متصل شده است که سیستم مهاربند برج گردان به یک سیستم انتقال مایع اتصال داد. سیستم انتقال مایع شامل رایزها مابین پایان خط لوله و (یک لوله یا محفظه شاخه به چند دهانه)Manifold مینفولد است.
Turret Mooring systems

The turret mooring system consists of a turret assembly that is integrated into a vessel and permanently fixed to the seabed by means of a mooring system. The turret system contains a bearing system that allows the vessel to rotate around the fixed geostatic part of the turret, which is attached to the mooring system

The turret mooring system can also be combined with a fluid transfer system that enables connection of (subsea) pipelines to the vessel like an F(P)SO. The fluid transfer system includes risers between the pipeline end manifold (PLEM) at the seabed and the geostatic part of the turret


In the turret a swivel provides the fluid transfer path between the geostatic part and the free weathervaning vessel that rotates around the turret. The turret system is fully passive and does not require active vessel heading control or active rotation systems in the turret or swivels. The turret system can be located externally or internally with respect to the vessel hull structure

Disconnectable Riser Turret Mooring

Disconnectable Buoyant Turret Mooring

Permanent Turret Mooring