دنیای مهندسی سازه های دریایی
Offshore Structuresدنیای مهندسی سازه های دریایی
Offshore Structuresدرباره من
 فوق لیسانس مهندسی عمران با گرایش مهندسی سازه های دریایی علوم تحقیقات تهران
bijan_4823t@yahoo.com
I am Bijan Mohammadi, Education: MS.c Civil Engineering- Marine Structures Engineering
For more information on the bottom left of the screen authorities to MY resume
www.linkedin.com
ادامه...
فوق لیسانس مهندسی عمران با گرایش مهندسی سازه های دریایی علوم تحقیقات تهران
bijan_4823t@yahoo.com
I am Bijan Mohammadi, Education: MS.c Civil Engineering- Marine Structures Engineering
For more information on the bottom left of the screen authorities to MY resume
www.linkedin.com
ادامه...
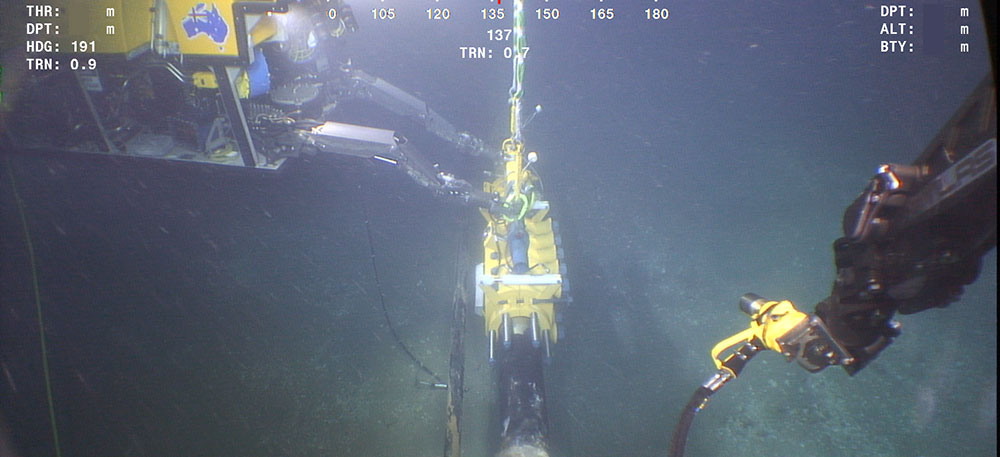
کاربرد ROV (چشم دریا)/ ROV applications
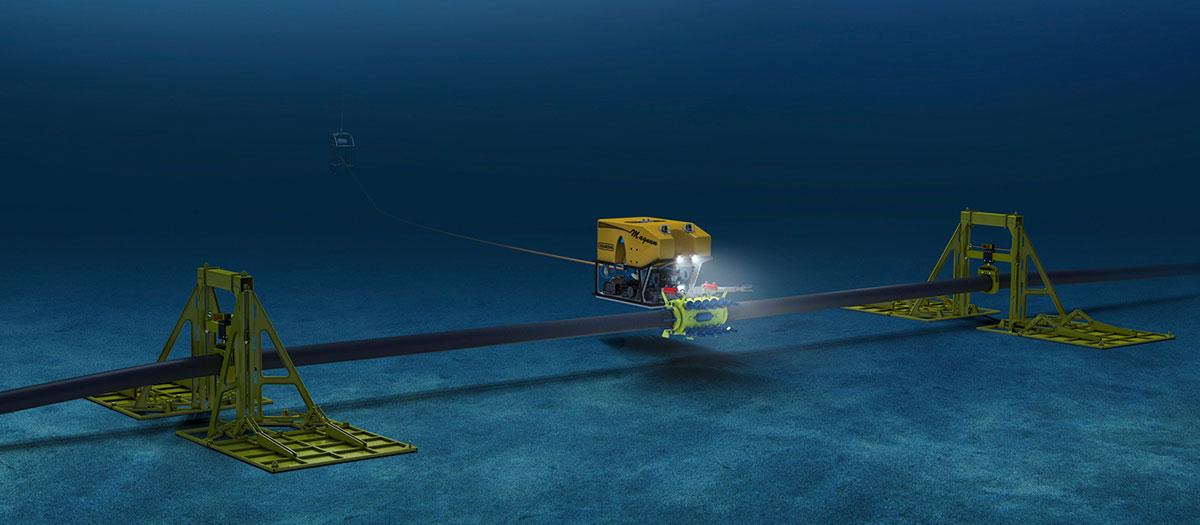
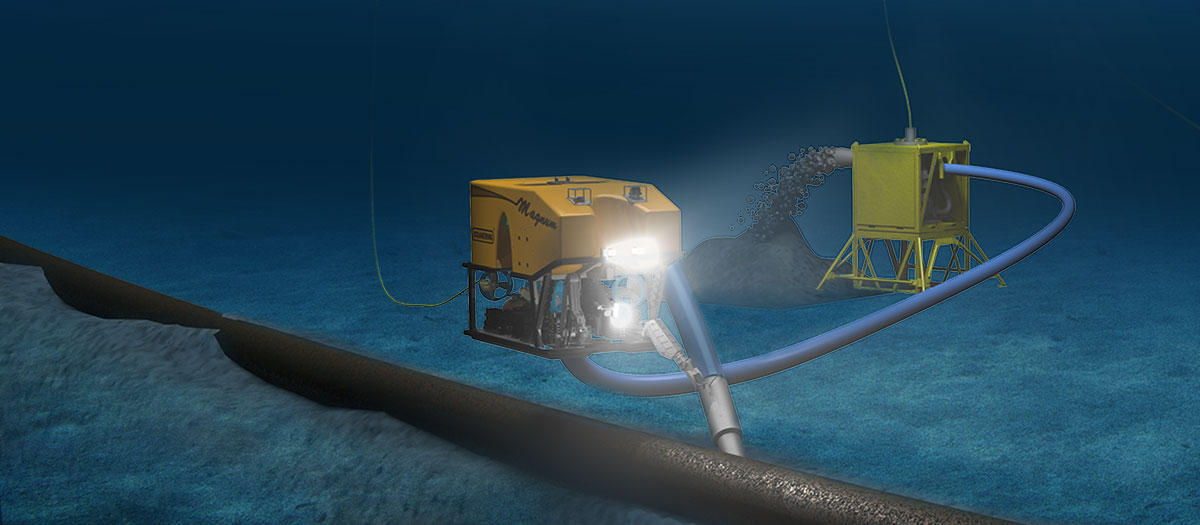
این انیمیشن کاربرد ROV (چشم دریا) عملیات این دستگاه را در صنایع فراساحل در زمینه خطوط لوله های نفتی ، نصب تجهیزات در زیر دریا را نشان می دهد.
This is animation application ROV operations in the offshore industry in the field of oil pipelines, subsea equipment installation in the show

کاربرد ROV (چشم دریا)
همانطور که قبلاً در همین بلاگ سازه های دریا نوشته شده بود مفصل درباره ROV (چشم دریا) توضیح خواهم دارد حال نوبت عمل است در انیمیشن گوشه های از کاربرد ROV نشان داده شده کاربرد دیگری هم دارد. با توجه به گستردهای علم سازه های دریایی سعی می شود در ماه های بعدی فلیم ها و انیمیشن ها بیشتری ارایه شود.
جهت کمک و حصول اطمینان از ایمنی و سلامت غواص، مطالعات متنوع و جمع آوری اطلاعات مربوط به محیط زیست و شیلات، دریاشناسی و اقیانوس شناسی.

بازرسی سازه ها و سکوی دریایی و ساحلی: جهت بازرسی عینی از عملکرد وسایل و ابزارآلات و یا بازبینی اثرات خوردگی، رسوب، محل وقوع ترک ها، تخمین بیولوژیک رسوبات و غیره
بازرسی از خطوط لوله: دنبال کردن خطوط لولهٴ زیردریایی جهت کنترل و بازبینی خطوط از نظر عدم وجود هرگونه نشتی و دیگر عیوب خطوط لوله و اطمینان از نصب صحیح آن ها
نقشه برداری: انجام نقشه برداری های عینی و آکوستیک، که قبل از نصب سازه های ساحلی، سکوهای فراساحلی، خطوط لوله، کابل ها و هر گونه عملیات نصب سازه های دریایی، باید انجام گردند
پاک سازی قطعات مخروبه: کمک به انجام ماموریت های ایمن سازی و پاک سازی فضا و بستر دریا در پیرامون اسکله ها، سکوها و تأسیسات ساحلی و فراساحلی که می توانند بستر دریا را به انبار بزرگی از مواد و مصالح مخروبه و مستعمل تبدیل کنند و ایمنی محیط کار و سلامت محیط زیست را به خطر بیندازند
تجهیزات زیردریایی: مشارکت در روند ساخت، کارکرد، بازرسی و تعمیر تجهیزات زیردریایی به خصوص در اعماق زیاد، نگهداری از سکوهای بارگذاری شده، برج های روشنایی و لنگرها
کشف و نجات اجساد و اجسام زیر دریا :جستجو، شناسایی و انجام عملیاتی نظیر نجات اضطراری وسائل زیرآبی غرق شده، بالاآوردن تجهیزات گم شده در بستر دریا و نیز کشف اجساد و اجسام به جای مانده از سوانح هوایی یا دریایی
جایگزینی غواصان: مشارکت در بسیاری از ماموریت هایی که انجام آن به سبب وجود خطر بسیار زیاد و یا حجم و گسترهٴ وسیع، برای غواصان مشکل یا غیرممکن باشد. موارد
بالا فقط کاربردهای
دریایی رایج را شامل می گردند در حالی که عملکرد این وسایل
نقیله کنترل از راه دور به
موارد بالا محدود نبوده و کاربردهای فراوان و متنوع دیگری را نیز شامل می گردند که در ادامه مورد بحث قرار خواهند گرفت
یکی از مهم ترین موارد کاربرد وسایل نقلیه کنترل از راه دور (چشم دریا) استفاده از آن ها در چیدمان و نیز خنثی سازی مین های جنگی است

علاوه بر صنایع نفت و گاز، ROV در نصب و نگهداری سکوها، سیستم های زیردریایی، نصب، حمل و نگهداری و به کاربری خطوط جریانی، سیم ها و کابل های های خطوط مخابراتی نیز نقش مهمی دارند
غیر از محیط دریا و اقیانوس وجود دارد:
مناطقی که در معرض تابش اشعه های رادیواکتیو قرار دارند یا اماکنی که امکان دید در آن ها به طور کلی برای غواص وجود ندارد، تونل های خطرناک و طولانِی آبی در اطراف سدهای برزگ و عظیم، قرارگرفتن در جریان رودخانه های متلاطم و خروشان از جمله کاربردهای ROV در خشکی است.
بازرسی از پایه های پل ها، * بازدید از بدنه و دریچه های سدها، * بازدید از مخازن ذخیرهٴ آب و دیگر مواد صنعتی جهت بازرسی، نمونه برداری و پاکسازی، * تهیه فیلم و عکس و نیز نمونه بردای و انتقال اشیاء و اجسام قدیمی غرق شده، * بازدید و بررسی بستر رودخانه ها، * تهیه فیلم و اسناد ویدئویی، * بازرسی از درون خطوط لوله های با قطر زیاد، * بازرسی از راکتور هسته ای.
دسته بندی انواع ROV
ROV کوچک
ROV الکتریکی با قابلیت بالا
ROV عمق پیما با قابلیت دستیابی به اعماق فوق العاده زیاد
ROV با ابعاد بزرگ و با قابلیت انجام کارهای سنگین
چنان که ذکر شد ROV اجزا مختلف و متعددی دارند که عمومًا شامل موارد کلی و اساسی زیر است:
بدنهٴ ربات
سیستم رانش و حسگرها
واسط (های) کنترلی و نمایشی
سیستم توزیع قدرت
کابل های هدایتی و ارتباطی
سیستم هدایت و کنترل
بازوهای مکانیکی ماهر
دوربین های تلویزیونی
نورافکن ها
لوازم ره گیری
هدایت، مسیریابی
کنترل و ناوبری ربات


Parts of ROV
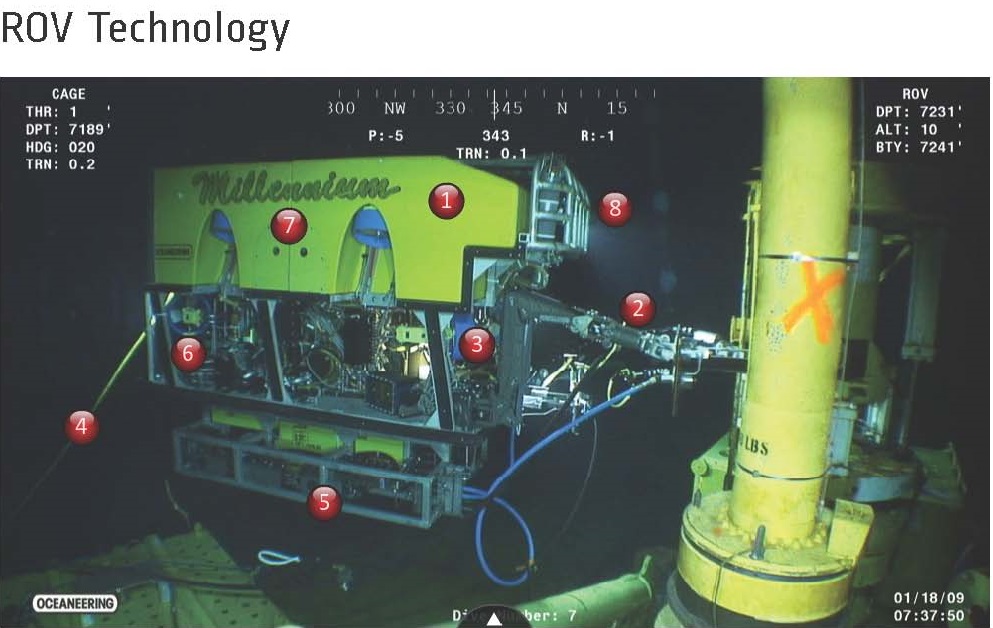
1.An millennium ROV
2.Manipulator
3.HD video cameras
4.The ROV Tether
5.A fluid intervention skid
6.Thrusters
7.ROV main flotation
8.LED Lighting
فیلم آموزش نحوه ارسال گزارش صورت معالات فصلی (موضوع ماده 169 مکرر قانون مالیات های مستقیم)
این فیلم نحوه پر کردن گزارش صورت معالات فصلی نمایش می دهد برای به روزکرد مبلغ5800000ریال باید به صورت آنلاین مبلغ را از سایت رویت کنید. اول فیلم را ملاحظه کنید بعد این کار بکنید.
This is film was a financial report Engineers,The engineering organization in Iran
با توجه به این حجم دانلود بالا است باید چند دقیقه صبر کند برای دانلود
Due to the high volume download and download server has changed. wait a few seconds for download this is file in Persian and it is the Iranian engineers tax return is for engineers
گزارش صورت معاملات فصلی (ماده 169 مکرر)
به منظور شفاف سازی اطلاعات اقتصادی دستورالعمل اجرایی موضوع ماده 169 مکرر قانون مالیات های مستقیم توسط سازمان امور مالیاتی کشور تدوین و اجرای آن از تاریخ 1/1/1391 آغاز گردیده است.
سوال اینجاست مهندس که دریافتی خودش با کسر مالیات از سازمان می گیرد چرا؟
آر او وی ها (ROV) یا چشم دریا /Remotely Operated Vehicle ROV
این فیلم معرفی دستگاه ROV (چشم دریا) می باشد.
This is introduces The Remotely Operated Underwater Vehicle or Remotely Operated Vehicle (ROV
وسیله نقلیه قابل کنترل از راه دور زیر دریایی ، آر او وی ها (ROV) یا چشم دریا چیست؟
در مورد اسم این وسیله باید گفت بهترین اسم چشم دریا است چون که تجهیزات دیگری با کاربردهای گوناگون ولی پیشرفته تر بنام های AUV و UUV وجود دارد ROV مخفف Remotely Operated underwater Vehicleیا Remotely Operated Vehicle و AUV مخفف Autonomous Underwater Vehicle و UUV مخفف Unmanned Underwater Vehicles
Nereid Under Ice مخفف Nereid UIاست.

برخی از عزیزان این آنها را به عنوان ربات های زیر آبی یاد کنند ولی تجهیزات گسترده به صورت ربات ها در زیر دریا به کار می رود با کارایی های متفاوت مانند این عکس
منابع و صنایع دریایی نفش و تأثیر مهمی در زندگی انسانها دارند. به همین دلیل مطالعه و بررسی بسیاری از مسائل مهندسی، زیستشناسی، تجاری و نظامی مرتبط با دریا، همواره مورد توجه محققان بودهاست. با توسعه و گسترش صنایع دریایی و علوم مرتبط با دریا، امروزه برای انجام بسیاری از کاربردهای کشف و استخراج منابع زیرآبی، بازرسی و جمعآوری اطلاعات زیست محیطی و تحقیقاتی و نیز نصب، تعمیر و نگهداری سازههای ساحلی و دریایی، به کارگیری تکنولوژیِ خاص و جدیدی برای پاسخگویی به نیازهای روزافزون پیش آمده، ضروری مینماید. استفاده از وسائل و ابزارآلات مهندسی که قابلیت به کارگیری در اعماق آب را دارند و کاربریهای متنوع در فضا و بستر دریا را ممکن میسازند، چنان در سالهای اخیر توسعه و گسترش یافته که توانایی بشر را در بررسی، تحقیق و کار در اعماق دریا، به شدت متحول نمودهاست.
استفاده از تجهیزاتی که بتوان آنها را بدون حضور مستقیم نیروی انسانی و از راه دور هدایت و کنترل نمود، کاربردهایی فراوانی یافتهاند و در بسیاری از موارد به جزء جدا نشدنیِ کاربردهای تجاری و صنعتی بدل گشتهاند، به گونهای که انجام بسیاری از پروژههای مهندسی و تحقیقاتی بدون آنها امکانپذیر نیست. این تجهیزات شامل رباتها و بازوهای مکانیکی هستند که قابلیت انجام عملیات از پیش برنامهریزی شده و نیز اجرای فرامین لحظهای کاربر را به نحوی مناسب و دقیق، دارند. در صنایع زیردریایی بنا به دلایلی که گفته شد، استفاده از تکنولوژی رباتیک در سالهای اخیر توسعه و گسترش فراوانی یافته و در بسیاری از شاخههای علوم و مهندسیِ دریا نقش مهم و اساسی پیدا نمودهاند. بهبود و افزایش کارایی این تکنولوژی نیازمند افزایش مطالعات مهندسی بر روی تمامی انواع و اجزای سیستمها و رباتهای زیرآبی، جهت انجام عملیات پیچیدهتر و فرامین متنوعتر است. به این منظور حجم عظیمی از مطالعات و تحقیقات مهندسی در سراسر جهان و در رشتهها و تخصصهای متفاوت بر این موضوع متمرکز شدهاند

ROV (چشم دریا)
وسائط نقلیه کنترل از راه دور، آراووی ها یا چشم دریا، روبات هائی هستند که در زیر آب توسط یک کنترل کننده هدایت می شوند. این آر او وی ها بوسیله یک رشته کابل با سطح آب در ارتباط می باشند. این کابل شامل یک رشته برای برقراری ارتباط، یک رشته برای ارسال انرژی و یک رشته برای انتقال اطلاعات می باشد. تمام آر او وی ها برای دید در زیر آب دارای ابزار بصری مانند دوربین می باشند. علاوه برآن بسته به نوع کاربردشان دارای ابزارهای دیگری نیز هستند. صنعت نفت و گاز فراساحل همراه با پیشرفت فنآوری و افزایش کارآئی آر او وی ها روز به روز در تمام جهان برای عملیات حفاری و انجام امور خدمات مربوط به اکتشاف در آب های عمیق و اجرای پروژه ها بیشتر به استفاده از آر او وی ها روی آورده است.


در اندازه ها و ابعاد متفاوت و با گسترهٴ متنوعی از تکنولوژی ها و امکانات در سال های اخیر طراحی، ساخت، آزمایش و به کارگیری شده و حتی در برخی موارد به تولید صنعتی رسیده اند. انواع این ROV (چشم دریا) از نمونه های کوچک و ساده ای که صرفاً مجهز به دروبین فیلم برداری کوچکی هستند تا گونه های پیشرفته و بسیار پیچیده ای که در اعماق دریاها به انجام عملیات های متنوع و متعددی به کار گرفته می شوند
اجزای ROV (چشم دریا) عبارت اند از سیستم:
هدایتی جهت کنترل ربات، سیستم رانش، سیستم به آب انداختن، منابع تامین قدرت و کابل ارتباطی که توان لازم جهت عملکرد پروانه ها و نیز دستورات و سیگنال های کنترلی را به ربات و داده های تولید شده توسط حسگرها را به اپراتور در سطح دریا منتقل می کنند.
در اغلب موارد این کابل شامل غلاف مقاومی است که آن را در برابر بارهای وارده و نیز برخوردهای احتمالی با اجسام واقع در زیر آب و پارگی و خرابی ناشی از آن، محافظت می کندROV (چشم دریا)، می توانند دارای تجهیزات متفاوتی باشند که از دوربین تلویزیونی کوچک، که جهت مشاهدات ساده به کار می روند تا مجموعه های پیچیده ای از ابزارآلات مانند بازوهای مکانیکی ماهر متنوع و قدرت مند، دوربین های تلویزیونی و ویدئویی و دیگر ابزار و وسایل پیشرفته را در بر می گیرد
تاریخچه آر او وی
غواصان تا عمق مشخصی می توانند در آب فرو روند. رفتن غواصان به آب های عمیق خطرناک و غیر منطقی است. آر او وی ها در صنعت نفت و گاز بصورت ابزاری بی رقیب برای غلبه بر محدودیت های رفتن غواصان به آب های عمیق درآمده اند. اولین روباط های غواصی در اواسط سال های 1960 بصورت وسائط نقلیه سرنشین دار، یا اچ او وی ها، بکار گرفته شدند. گرچه اچ او وی ها تا حدی موفق بودند اما بزرگترین محدودیتشان وجود انسان در آن ها بود. آن ها بعلت وجود انسان قادر به رفتن در آب های عمیق بودند.
گرچه اولین آر او وی کابلی در سال 1953 توسط یک فرانسوی به نام دیمتری ربیکف ساخته شد، اما فن آوری آن توسط ارتش امریکا برای بازیابی اشیاء مفقود شده در دریا کامل شد. نیروی دریائی امریکا در سال 1966 با استفاده از آر او وی یک بمب اتمی را که در اثر سقوط هواپیما در آب های ساحلی اسپانیا مفقود شده بود پیدا نمود و در سال 1973 برای نجات جان دریانوردان یک زیردریائی که در آب های ایرلند غرق شده بود از این وسیله بهره گرفت.
What is remotely operated underwater vehicle or Remotely Operated Vehicle ROV

A remotely operated underwater vehicle, commonly referred to as an ROV, is a tethered underwater vehicle. They are common in deep water industries such as offshore hydrocarbon extraction. While the traditional abbreviation "ROV" stands for remotely operated vehicle, one must distinguish it from remote control vehicles operating on land or in the air. ROVs are unoccupied, highly maneuverable, and operated by a crew aboard a vessel. They are linked to the ship by either a neutrally buoyant tether or, often when working in rough conditions or in deeper water, a load-carrying umbilical cable is used along with a tether management system (TMS). The TMS is either a garage-like device which contains the ROV during lowering through the splash zone or, on larger work-class ROVs, a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimized

The umbilical cable is an armored cable that contains a group of electrical conductors and fiber optics that carry electrical power, video, and data signals between the operator and the TMS. Where used, the TMS then relays the signals and power for the ROV down the tether cable. Once at the ROV, the electrical power is distributed between the components of the ROV. However, in high-power applications, most of the electrical power drives a high-power
Electrical motor which drives a hydraulic pump. The hydraulic pump is then used for propulsion and to power equipment such as torque tools and manipulator arms where electrical motors would be too difficult to implement subsea. Most ROVs are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, water temperature, water density, sound velocity, light penetration, and temperature
History OF THE ROV
Human divers can only submerge to certain depths and the skill and danger involved makes deepwater diving unrealistic developed to overcome the limitations of human subsea divers ROVs have become an indispensable tool to the offshore oil and gas industry

The first iteration of the robotic diving concept was the Human
Occupied Vehicle, or HOV, which was developed in the mid1960s.
While Dimitri Rebikoff is credited with building the first tethered ROV in 1953, the US military expanded on the technology to retrieve equipment lost at sea. In 1966, the US Navy recovered an atomic
bomb lost in a plane crash offshore Spain using an ROV, and in 1973,
An ROV was used to save sailors in a sunken submersible offshore
Ireland
The commercial world quickly began manufacturing preliminary
versions of ROVs for the offshore oil and gas industry. Although these
products were not as successful initially, the technology has come a
long way, and now ROVs are regularly used offshore for petroleum
developments and drilling, military and science efforts,
as well as underwater cable endeavors
Types Of ROVs

ROVs can vary in size from that of a bread box to a large van. The
functions ROVs perform can range from simply carrying a camera to
observe subsea environments to housing multiple agile arms to
perform numerous functions subsea.

Used primarily for observation and inspection operations, Small
Electric Vehicles are the tiniest version of ROVs. These robots simply
carry a single camera and are deployed in waters no greater than 984
feet (300 meters) deep
High Capability Electric ROVs are larger versions of their Small
Electric Vehicle cousins
These ROVs are able to dive to depths up to
20,000 feet (6,096 meters), but they are still only equipped with video cameras and are unable to perform many other tasks because their electricity supply limits them. Primarily used by the science and military industries, High Capability Electric ROVs are unable to perform any heavy tasks typically required by the oil and gas industry

The next iteration of ROV, the Work Class Vehicle is powered electrically and hydraulically, enabling some more serious work subsea. Although payload and lift capabilities are restricted, the Work
Class Vehicle ROV does generally include a seven function manipulator and a five function grabber.
Most of this class of ROV is deployed in the drilling and construction support sector, as well as
pipeline inspection

The most advanced version of ROV is the Heavy Work Class Vehicle
ROV. This kind of ROV is capable of working in waters measuring up
to 10,000 feet (3,000 meters) deep. Aptly named, the Heavy Work
Class Vehicle boasts horsepower ranging from 100 to 250 and has lift
capabilities up to 11,025 pounds. Additionally, these ROVs house
multiple manipulators and grabbers capable of performing subsea tieins and Deepwater installations.

simulations show offshore wind turbine farms/شبیه سازی مرزعه توربین های بادی دریایی
این فیلم شبیه سازی مزرعه توربین های بادی دریایی را نشان می دهد. که توسط مارک جاکوبسن استاد مهندسی عمران و محیط زیست در دانشگاه استنفورد مدل شده است.
This film shows the offshore wind turbine farm simulation. By Mark Jacobson, professor of civil and environmental engineering at Stanford model


مزارع بادی دریایی می توانند نیروی طوفان ها (توفان ها) را کاهش دهند

“مارک جاکوبسن"، استاد مهندسی عمران و محیط زیست در دانشگاه استنفورد، طی 24 سال گذشته مدل رایانه ای پیچیده ای را برای مطالعه آلودگی هوا، انرژی، آب و هوا و اقلیم توسعه داده است. کاربرد اخیر این مدل، شبیه سازی گسترش طوفان وهمچنین، تعیین میزان انرژی که توربین های بادی می توانند از جریان های باد جهانی استخراج کنند، بوده است.
با توجه به این قبیل مطالعات و پس از طوفان های "سندی" و "کاترینا"، این پرسش برای جاکوبسن مطرح شد که مواجهه طوفان با دامنه وسیعی از توربین های بادی دریایی چه نتیجه ای در پی خواهد داشت؟ آیا انرژی استخراج شده از طوفان به واسطه چرخش توربین های بادی موجب کاهش سرعت باد و در نتیجه کاهش قدرت طوفان شده و یا طوفان توربین ها را از بین خواهد برد؟
وی گفت، « اولین فکری که داشتم این بود که شاید توربین ها زور طوفان را به اندازه کافی بگیرند و به این ترتیب طوفان را
تضعیف کنند، اما بدون استفاده از مدل کامپیوتری نمی توانستم این فکر را ثابت کنم.»
بر همین اساس، جاکوبسن توسعه هرچه بیشتر مدل خود و شبیه سازی آنچه هنگام مواجهه طوفان با یک مزرعه بادی عظیم در فاصله چند کلیومتری از ساحل رخ می دهد را انجام داد. وی دریافت که توربین های بادی می توانند در طوفان اختلال ایجاد کرده، سرعت بادهای آن را تا 92مایل در ساعت کاهش داده و در نهایت کاهش موج طوفان به میزان 79 درصد را موجب شوند.
جاکوبسن به همراه همکاران خود "کریستینا آرچر" و "ویلت کمپتون" از دانشگاه دلآور، سه طوفان "سندی"، "ایزاک" و "کاترینا" را شبیه سازی کردند. بر همین اساس، آنها دریافتند که با حضور توربین های بادی، سرعت چرخش بیرونی بادهای طوفان کاهش می یابد. این مساله کاهش ارتفاع موج و در نتیجه کاهش حرکت هوا به سمت مرکز طوفان را موجب شده و با افزایش فشار مرکزی به کاهش سرعت بادهای طوفان و پراکندگی سریعتر آن منجر می شود.
در مورد طوفان کاترینا، مدل جاکوبسن نشان داد که مزرعه ای از 78 هزار توربین بادی دریایی پیش از رسیدن طوفان به خشکی موجب تضعیف چشمگیر نیروی آن می شود. در مدل رایانه ای هنگامی که طوفان کارتینا به خشکی می رسد سرعت بادهای شبیه سازی شده به 36 تا 44متر در ثانیه و موج طوفان تا 79 درصد کاهش یافته است. برای طوفان سندی، سرعت باد به 35 تا 39 متر در ثانیه و موج طوفان تا 34 درصد کاهش یافت.
بر همین اساس، استفاده از انرژی بادی می تواند بیش از هر زمان دیگری مورد توجه قرار بگیرد.کاهش هزینه خسارات طوفان یکی از مشوق های اصلی در نظر گرفته می شود. خسارات ناشی از چندین طوفان به واسطه بادهای سریع و سیل های ناشی از موج طوفان می تواند به میلیاردها دلار برسد. به عنوان مثال، طوفان سندی خسارتی 82 میلیارد دلاری را در سه ایالت آمریکا بر جای گذاشت.
از سوی دیگر، توربین های بادی می توانند هزینه خود را در بلند مدت و با تولید برق در شرایطی که موجب کاهش آلودگی هوا و گرمایش جهانی شده و ثبات انرژی را فراهم می کنند، جبران کنند. توربین های فعلی می توانند در برابر بادهای تا سرعت 112 مایل در ساعت مقاومت کرده که در دامنه طوفان های درجه 2 تا 3 قرار می گیرد. این در شرایطی است که وجود مزارع بادی می توانند مانع رسیدن بادهای طوفان به چنین سرعت هایی بشوند.
آیا در ایران مطالعات نصب توربین های بادی دریای صورت گرفته است؟

در مورخه 07/08/1390 در روزنامه خراسان شماره انتشار 17969خبری با این مضنون به چاپ رسید. "ایران در آستانه تولید برق از بادهای دریای عمان" فاز مطالعاتی نصب توربین های تولید برق در دریای عمان به پایان رسیده و طرح تولید انرژی از بادهای عمان نهایی شده و بدین ترتیب ایران در آستانه تولید برق از بادهای دریای عمان قرار گرفته است.
بادهای گرادیان چیست؟
برای طراحی سازه های دریایی نیاز به سرعت باد گرادیان می باشد. سرعت بادگرادیان می تواند با تابعی از گرادیان فشار، شعاع انحنای منحنی های هم فشار، عرض جغرافیایی و چگالی هوار به صورت زیر بیان شود.
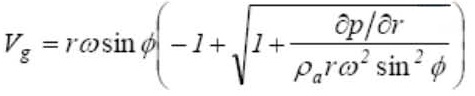
پیش از انجام محاسبات، واحد اندازه گیرها ابتدا به سیستم واحدها سانتیمتر-گرم-ثانیه که در بالا نوشته شده ست تبدیل می شود. باید توجه داشت که یک درجه عرض جغرافیایی با مساحتی در حدود 10 به توان 7 *1.110 سانتیمتر برابر می کند. سرعت واقعی باد در سطح دریا عموماّ کمتر از مقدار بدست آمده از رابطه بادگرادیان است. در نیمکره شمالی، باد پیرامون گردباد، پاد سرعت گرد و به سمت بیرون می زد. مشخص شده است که رابطه بین سرعت بادهای گرادیان و سرعت واقعی باد در سطح دریا با عرض جغرافیا تغییر می کند.
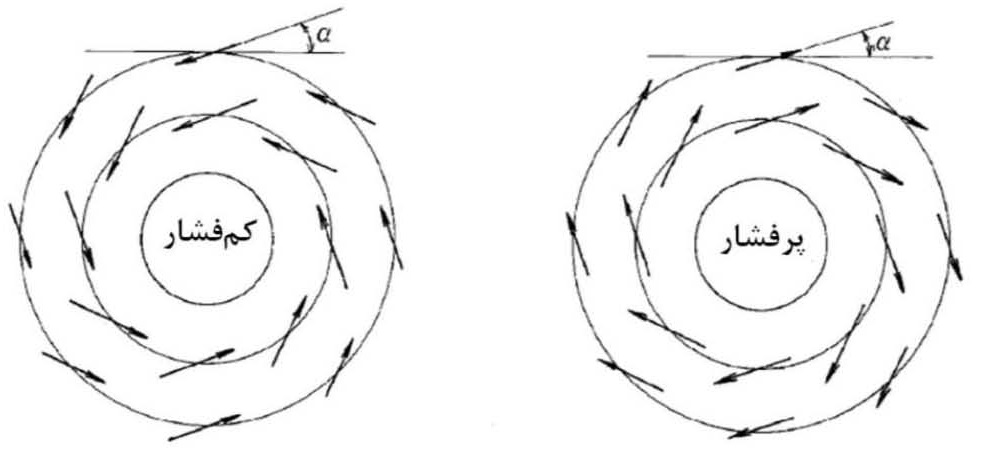
جهت باد یک گرد باد (کم فشار) و یک گردباد متضاد (پرفشار)
باد های خلیج فارس
شکل زیر موقعیت 32 ایستگاه سینوپتیک پیرامون خلیج فارس و تنگه هرمز را نشان می دهد. اگرچه اغلب ایستگاه ها در اواسط دهه 1980 میلادی احداث شده اند، داده های ایستگاه های بوشهر، بندرعباس و ظهران از قبل از دهه 1960 میلادی شروع می شود.

موقعیت 32 ایستگاه سینوپتیک پیروان خلیج فارس و تنگه هرمز
بادهای دریای عمان (خلیج عمان)
ایستگاه های سینوپتیک کشور در دریای عمان به سه ایستگاه جاسک، چابهار و کنارک منحصر می شوند. داده های ایستگاه چابهار از سال 1963 میلادی و ایستگاه کنارک از 1984 میلادی در دسترس است. شکل زیر گلبادهای ایستگاه های سپنوپتیک اسن دو ایستگاه را نشان می دهد.
سواحل جنوبی ایران در کرانه دریای عمان به صورت اتفاقی و غیر معمول تحت تاثیر طوفان های (توفان های) استوایی نیز قرار دارند. با مد نظر قرار دادن یک فاصله تاثیر شعاعی 1000 کیلومتری از انتهای شرقی خطوط ساحلی ایران در دریای عمان (خلیج گواتر) شکل زیر مجموعه داده های از طوفان های استوایی که از نزدیکی خطوط ساحلی ایران گذشته اند را در فاصله زمانی 2003-1945 نشان می دهد.
در شکل طوفان هایی که از اطلاعات حداکثر سرعت برخواردار بوده اند به صورت رنگی به نمایش در آمد است و شدت رنگ بسته به سرعت باد متغیر است. مشاهده می شود حرکت طوفان ها عموما در شمال اقیانوس هند و دریای عرب متمایل به غرب به سمت عمان بوده و یا آنها با چرخش به شمال به سمت پاکستان و هند تغییر مسیرمی دهند. نزدیکتر واقعه طوفان به ایران در مجموعه داده های از طوفان های استوایی (در فاصله زمانی 2003-1945) در سال 1948 رخ داده و در نزدیکترین نقطه از مسیر خود،250 کیلومتر تا چابهار فاصله داشته است.
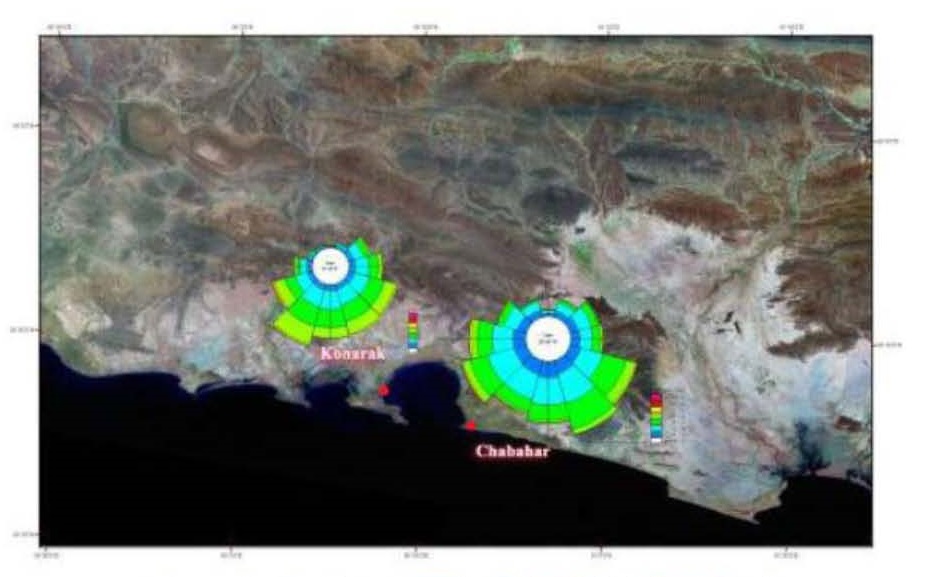
گلباد های ایستگاه های سینوپتیک ساحلی خلیج چابهار
در بررسی طوفانهای قبل از سال 1945، سازمان هواشناسی هند(1979) طوفان های تاریخی متعددی را در سال های پایانی سده1800 و سال ابتدایی سده 1900 را نسان می دهد که اثبات مستقیمی بر دریای عمان و خطوط ساحلی ایران اعمال کرده اند. سازمان هواشناسی هند (1979) سرعت بیشینه باد خاصی را برای این رویدادها مشخص نکرده و تنها به این نکته ارشاره شده است که سرعت باد از 50 گره دریایی بیشتر بوده است.
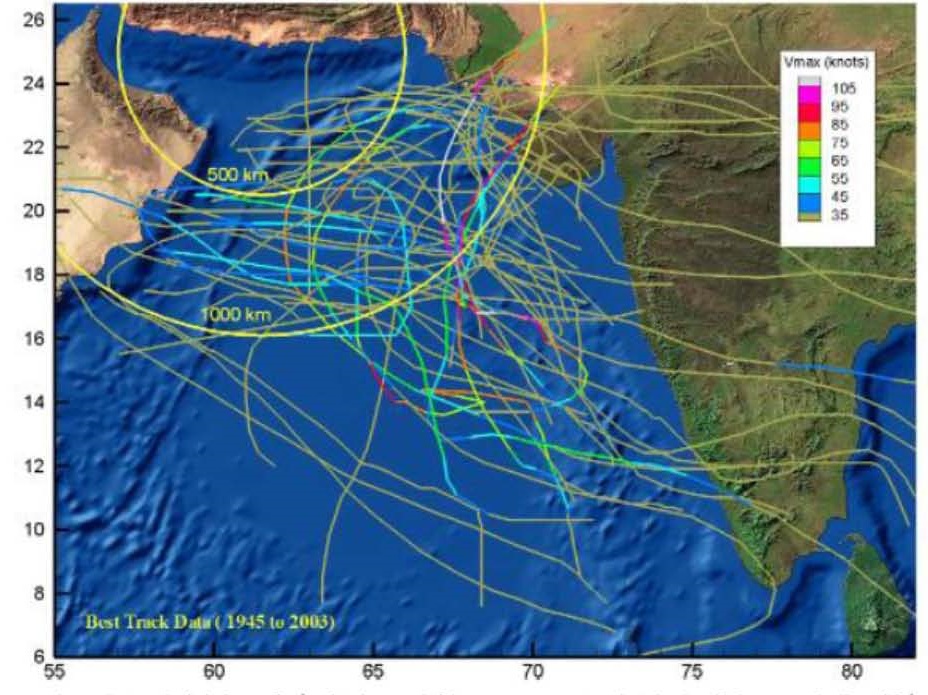
مسیر طوفان های استوایی در محدود 1000 کلیومتری انتهای شرقی سواحل ایرانی دریا عمان
با حرکت به سمت شمال و دورشدن از عمان، شدت طوفان رو به کاستی نهاد. سرعت باد ثبت شده در چابهار در ساعت 20 روز ژوئن به مقدار حداکثر 55.69 کلیومتر در ساعت رسید.این نقشه بادهای سراسر زمین در مدل جدید ناسا ارایه شده است دایره های سفید و روشن بر فراز اقیانوس اطلس شمالی و دریای چین جنوبی گردبادها هستند. رنگ سفید همان بادهای هستند که ما آنها را حس می کنم ،حال می توانیم بگویم سواحل ما در موقعیت بادهای می باشد یا نه

در زیر به چند نمونه از موارد استعمال توربین بادیدر حوزه خلیج فارس پرداخته شده است:
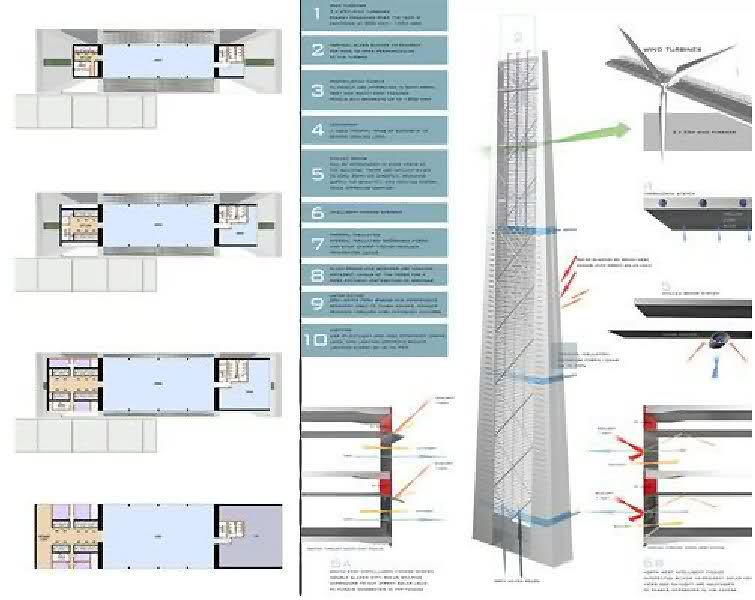
مرکز تجارت جهانی بحرین
توربین بادی که تا کنون به عنوان یک منبع تامین انرژی برق در شهرهای بادخیز جایگزین نیروگاهها بوده با ابتکار معمار برجسته شرکت ساختمانی اتکینز (Atkins) در برج تجارت جهانی در بحرین نصب شده تا به عنوان روش جدید تامین انرژی برق در ساختمان های نسل امروز به کار گرفته شود. این برج در قسمتی از ساحل بحرین که سرعت باد در آن بیشتر از مناطق دیگر است،احداث شده است.
سه ملخ ۳۰ متری که بین این دو برج قرار دارد، ۱۱۰۰ مگاوات برق در سال برای این ساختمان های ۴۲ طبقه تولید می کند. تحقیقات به منظور طراحی این برج بیش از ۵ سال به طول انجامید. پیش از ساخته شدن این ساختمان، ابهامات زیادی وجود داشت. سر و صدای ناشی از چرخیدن توربین ها برای ساکنان ساختمان، فشار بار توربین ها به دو ساختمانی که قرار است این توربین ها در جایگاه پل، آن ها را به هم وصل کند، تاثیر رعد و
برق و
حرکت پرندگان بر حرکت توربین و
ده ها نکتهٴ دیگر که فهرست آن به ۲۰۰ مورد رسیده بود


همهٴ این سناریوها با در نظر گرفتن مسائل خطر و ریسک ناشی از آن مورد بررسی قرار گرفت. تحقیقات نشان می دهد که نزدیک به ۷۰ ٪ از بادهایی که از خلیج فارس به ساحل بحرین می وزد،به همین دلیل قرار شد این ساختمان به صورت مجموعه ای از دو سازهٴ موازی ساخته شود که توربین های بادی مانند پلی این دو بازو را به هم متصل کند.
در این توربین ها لنزهایی کار گذاشته شده که وقتی نزدیک شدن یک شیء مانند پرنده یا وجود رعد و
برق را تشخیص می دهد، دستور خاموش شدن خودکار توربین ها صادر می کند. صدای توربین ها هم با دستگاه کنترل صوتی که درون آن ها کار گذاشته شده، تا حد زیادی کنترل می شود.

هر کدام از این سه توربین ۲۲۵ کیلووات برق تولید می کنند که در مجموع ظرفیت تولید برق آن ها به ۶۷۵ کیلووات می رسد. محاسبات نشان می دهد که این توربین ها ۱۰ تا ۱۵ درصد از نیاز این ساختمان به انرژی را تامین می کند. معلوم نیست که عمرمفید این توربین ها چقدر باشد اما سازندگان آن می گویند با توجه به موقعیت جغرافیایی این ساختمان در مکانی واقع شده که سازه ای در اطراف آن نیست و باد تمیز از این توربین ها عبور می کند، شاید عمر آن ها تا ۲۰ سال برسد. فاصلهٴ این دو ساختمان در قسمت جلو ۱۲۰ متر و در قسمت عقب ۳۰ متر است. به این ترتیب حداکثر میزان باد به این توربین ها برخورد می کند. طراحی ساختمان ها هم به گونه ای است که نه تنها سرعت باد را می افزاید بلکه جریان آن را به سمت توربین ها هدایت می کند. سه توربین واقع شده بین این دو ساختمان با یک سرعت می چرخند و به همین دلیل جریان برق تولید شده توسط آن ها یکسان است.

Not wanting to be left behind by Saudi Arabia and Dubai, the country of Bahrain has been approving some interesting and eye-popping developments in the realm of green architecture. Especially interesting is the new Bahrain world trade center located in the city of Manama. The 50-story complex contains two identical towers that rise over 240 meters in height. The sail-shaped buildings offer a visually striking silhouette, appropriately referencing the maritime environment of this small Middle Eastern island, and boast one very unique feature — 3 giant wind turbines tying the two “sails” together

The design firm of Atkins did not believe that the look of the project was enough, and felt that it was important to incorporate sustainability features into this design. They first attempted to bring in solar panels into the project, but found that the extreme heat conditions of Bahrain made it an unfeasible proposition. So they turned to a second option, and came up with an even more striking image, that of the three 29 meter wind turbines, each supported by a 30-meter bridge spanning between the two towers.
The floorplan was key in making this feature work. The wing-like towers help to funnel and accelerate the wind velocity between them. Furthermore, the difference in the vertical shape of the towers should help reduce the pressure differences between the bridges, which, when combined with an increased wind speed at the higher levels, should provide an equal velocity amongst the turbines. All this will provide for an even greater efficiency in the powering of the generators.When I heard about this project, I honestly thought that this feature would eventually be dropped. We’ve all seen it happen, a cool looking tower ends up changing dramatically due to cost-cutting, changes in the marketplace conditions, or a change in scope or brief

برج فانوس دریایی دبی
این برج که توسط گروه مهندسین مشاور اتکینز طراحی شده است دارای ۶۶ طبقه به ارتفاع ۴۰۰ متر و زیر بنای ۱۴۰ هزار متر مربع است.

در سمت جنوبی این بنا تعداد ۴۰۰۰ پانل خورشیدی پیش بینی شده است. ۳ توربین بادی به قطر ۲۹ متر نیز در بخش فوقانی بنا تعبیه شده اند. طراحان ادعا دارند که این ساختمان نسبت به دیگر ساختمان های مشابه ۶۵ ٪ انرژی کمتر و ۴۰ ٪ آب کمتر مصرف خواهد نمود.


Animation Single buoy mooring or single point mooring with full details/انیمیشن بویه مهاری تک با جزئیات کامل
این انیمیشن طریقه نصب و راه اندازی بویه مهاری تک یا مهاری تک نقطه را جزئیات کامل نشان می دهد.
This animation single buoy mooring or single point mooring mode installation show detail.


متاسفانه اسمی که برای این سازه سازمان بنادر دریا نوردی در آیین نامه کارهای دریایی ایران و همچنین واژه نامه سازه های ساحلی معاونت برنامه ریزی و نظارت راهبری رییس جمهوری نشریه شماره 628 انتخاب کردن به نظر دارای مشکلات است اگر من این سازه ترجمه می کنم با تمام واژه نامه فارسی باشد اگر من اسمی را برای سازه انتخاب می کنم با توجه به کارکرد آن انتخاب می کنم نه که دور هم بشنیم مهاربند بکنم مهاری بعدش هم خود این واژه نامه را به انگلیسی ترجمه کنیم یک چیز دیگر باشد هرچند واژه یک سازه فراساحلی است.
Buoy یعنی جسم شناور، روآبی، رهنما شناور اگر من برای این سازه اسم انتخاب می کردم اسم فعلی نبود.
.JPG)
.JPG)
بویه مهاری تک یا مهاربند تک نقطه ای چیست؟
این سازه که در عمق های بالای 15 متری نصب می شود عمومآ برای تخلیه و بارگیری نفت و گاز به عنوان یک پایانه نفتی برای نفتکش ها مورد استفاده قرار می گیرد. هدف اصلی این سازه شناور انتقال مایعات و گاز از ساحل به فراساحل می باشد . همانطور که در این انیمیشین ملاحظه خواهید کرد در کنار سکوهای نفتی از این سازه برای بارگیری استفاده می شود .
نکته مهمی که باید در طراحی زنجیر مهاری ها مورد استفاده باید قرار گیرد سازه زنجیر مهاری باید با روش مناسب به گونه ارزیابی گردد که زنجیرها قادر به نگهداری جسم شناور در محل خود به طور ایمن تحت اعمال بزرگترین بار باشد .بزرگترین بار نیروهای خارجی که در طراحی نقش مهمی دارند. برای نیروهای خارجی ، از بین ترکیب بارهای زیر که بزرگترین نیروی کل را ارایه دهد، استفاده می گررد.
1- نیروی عکس العمل ضربه گیر و نیروی جریان کهکشان و مهکشان (جزر ومد)
2- نیروی طناب مهاری کشتی و نیروی جریان کهکشان و مهکشان
3- نیروی موج و نیروی جریان کهکشان و مهکشان

بویه مهاری از نظر سازه ای به سه دسته تقسیم می شود که شامل :
1- وزنه ای 2- لنگر زنجیری 3- ترکیب وزنه و لنگر زنجیری می باشد.

جزئیات عمومی بویه های مهاری/Details of mooring buoy

What is a Single buoy mooring(SBM) Or Single point mooring (SPM
A Single buoy mooring (SBM) (also known as single point mooring or SPM) is a loading buoy anchored offshore, that serves as a mooring point and interconnect for tankers loading or offloading gas or liquid products
SPMs are the link between geostatic subsea manifold connections and weathervaining tankers. They are capable of handling any size ship, even very large crude carriers (VLCC) where no alternative facility is available
Its constituent companies started their offshore activities in the early 1950s and SBM subsequently became a pioneer in single point mooring (SPM) systems. The Single Point Mooring concept originated in the 1960´s as a solution to the problem of transferring crude oil from an onshore reception facility or refinery into very large crude carriers oil tankers
The main purpose of the buoy is to transfer liquids between onshore or offshore facilities and the moored tanker

There are a number of types of facilities presently used to load or off-load tankers in open water. These include Sea Islands; spread moorings, single point mooring structures and single buoy moorings. Of these, the single buoy mooring has been most frequently installed to service today's very large tankers
The popularity of the single buoy mooring stems from the fact that it can be installed at almost any offshore location where deep water is relatively close to shore. Water depth can be selected to suit any required tanker draft. Nearly the only limitation is that the buoy must be installed a safe distance from shoal water that could constitute a danger to the tanker while mooring or unmooring
The submarine pipeline and single buoy mooring system, shown schematically in Figure 1, consist of a submarine pipeline from the onshore tank farm, a bottom manifold at the end of the submarine pipeline, underbody hose connecting the bottom manifold with the buoy, the buoy itself, and one or more strings of floating hose between the buoy and the tanker. When moored to the buoy, the tanker can rotate or weathervane to minimize the combined force of wind, wave and current
10( (2).jpg)
The submarine pipeline and single buoy mooring system was first put into use in 1959. Since that time there has been a continuous increase in the number of single buoy mooring installations around the world. (Figure 2
10( (3).jpg)
این آمارها برای سال 1970 می باشد/ The statistics is for 1970
Recent tabulations show a total of 46 installations located in 23 different countries (Figure 3
Most of the installations put into service since 1965 have been designed for 100,000 dwt tankers or larger. Early next year a buoy designed to service 350,000 dwt tankers will be commissioned
10( (1).jpg)
During the decade that the single buoy moorings have been in use there have been only a few relatively small oil spills associated with their operation. Because of the increasing popularity of the submarine pipeline and single buoy mooring system and its use for ever large tankers, it is extremely important that designs be adequate and operation be carefully controlled
یک نگاه به کاربرد بویه مهاری تک که در منطقه خلیج فارس قرارداد.
Use single buoy mooring contract in the Persian Gulf region

.jpg)
Major Saudi Arabian Offshore Oil Fields. Oil export terminals are indicated with reddish dots
The largest oil exporting terminal in the world is located on the Ras Tanura peninsula and is capable of loading over 5 million barrels of oil per day onto tankers moored on one of two T-shaped terminals (small vessels only) or on one of a cluster of four Sea Islands located offshore in deeper water. The limit for tankers berthed at the Sea Islands is 550,000 dwt (dead-weight tons
.jpg)
The Al Juaymah Offshore Terminal is located to the northwest of Ras Tanura, just east of the Qatif oil field as shown below. The Qatif field lies both on and off shore, with several offshore platforms positioned to drill and maintain offshore wells. Oil is loaded onto tankers from Single Point Moorings (SPMs) anchored in deeper water such that larger ships can be handled (up to 700,000 dwt). It has been in operation since 1974. The Al Juaymah complex also includes a pier from which liquified natural gas (LNG) is loaded onto ships
.jpg)
Oil is similarly delivered from shore in underwater pipeline to a platform, distributed to the SPMs and then transferred to the tanker via large flexible hoses connecting them to the SPM. There are six SPMs at Al Juaymah, which can theoretically output six million barrels per day and has been in operation as early as the 1970s. In a 2005 Google Earth satellite image, I can only find two SPMs, although others might be present in low resolution images
.jpg)
Shown below is a close up of the darker tanker from above receiving oil. There are two "hoses" attached to this tanker, whereas there are three attached to the other. I haven't found anything recent on loading rates, although SPE 4013-MS suggests that each (in the late 1970s) was designed for a flow of at 130,000 barrels per hour but averaged only half that in practice


